본 프로젝트 진행을 위한 코드에 대한 소개 및 설명을 하고자 한다.

- PB0(조도센서)
MODE: Input mode, CNF: Analog Mode
- PC13(조도 LED)
MODE: Output mode, CNF: General purpose push-pull
- PC12(인체감지센서)
MODE: Input mode, CNF: Input with push-up/pull-down
- PC11(엔진 LED)
MODE: Output mode, CNF: General purpose push-pull
- PC10(DC 모터, 선풍기)
MODE: Output mode, CNF: General purpose push-pull
- PC9(히터 LED)
MODE: Output mode, CNF: General purpose push-pull
- PC8(히터)
MODE: Output mode, CNF: General purpose push-pull (전력문제로 사용은 하지 않음)
- PB1(PWM for 서보모터, 자동차문)
MODE: Output mode, CNF: Alternate push-pull
- PB8(PWM for 서보모터, 가림막)
MODE: Output mode, CNF: Alternate push-pull
- USART1(감바랩스 인공지능 모듈과 통신)
- PA9(TX)
MODE: Output mode, CNF: Alternate push-pull
- PA10(RX)
MODE: Input mode, CNF: Floating input
- USART2(핸드폰과 블루투스 통신)
- PA2(TX)
MODE: Output mode, CNF: Alternate push-pull
- PA3(RX)
MODE: Input mode, CNF: Floating input




이제 기본적인 세팅을 위한 코드가 끝났다.
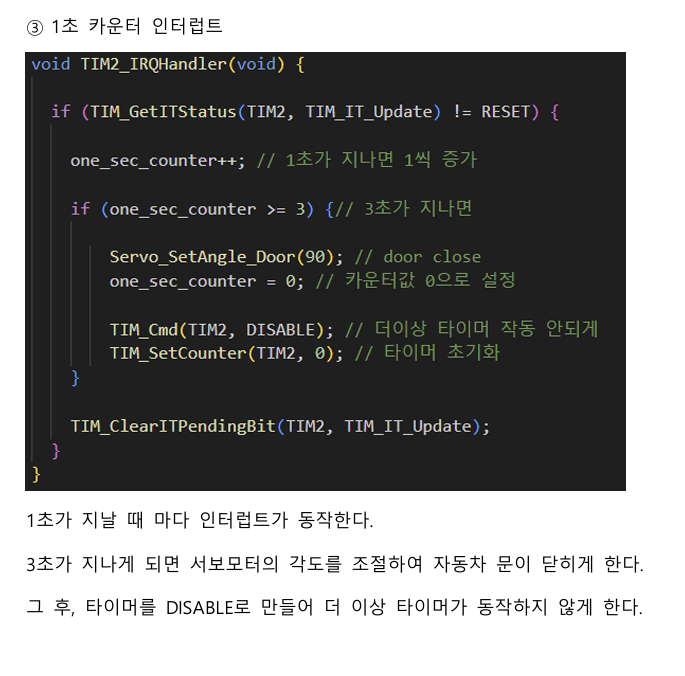
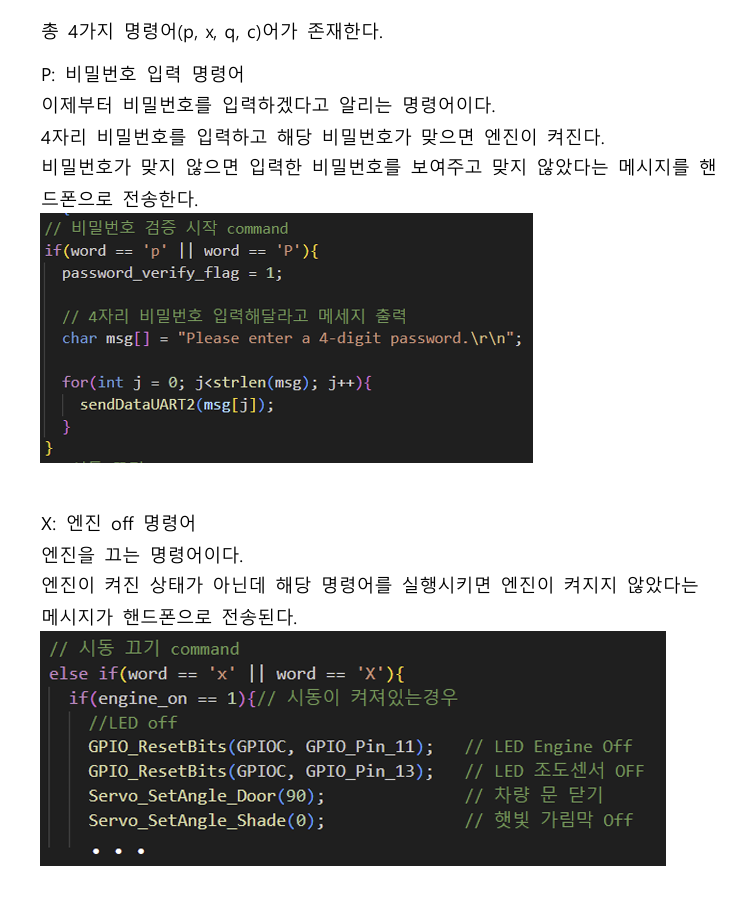
다음은 기능별 코드에 대해 작성한 부분이다.
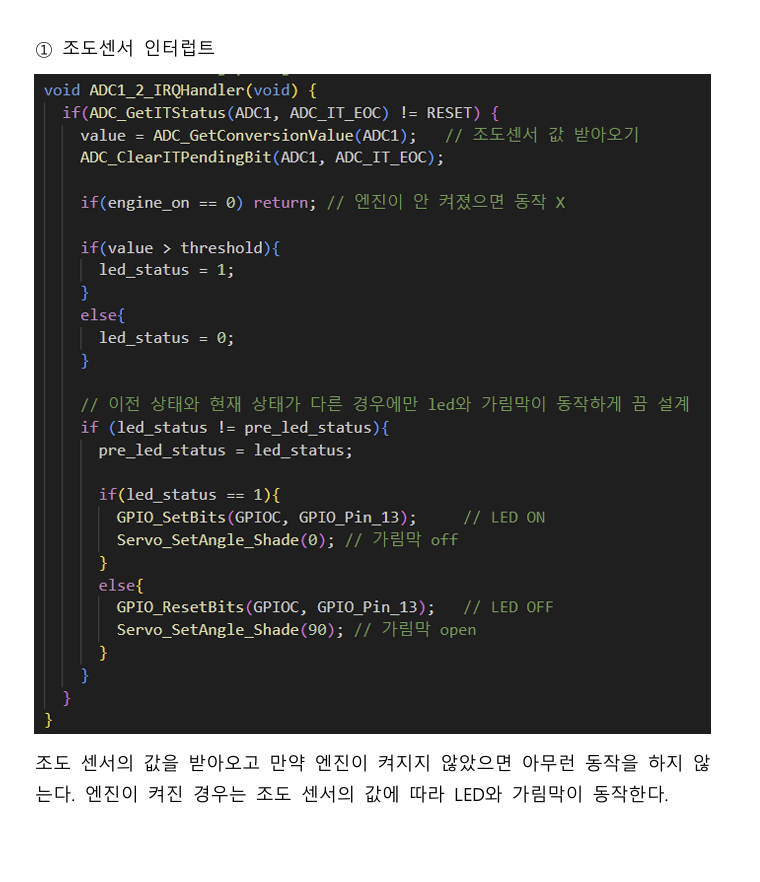





이렇게 작성된 각 기능별 코드를 이제 Main 함수에서 각 flag 값에 따라 동작할 수 있게 코드를 작성했다.

'개인 프로젝트' 카테고리의 다른 글
| <스마트 캠핑카>임베디드시스템 프로젝트- 실행 결과 (0) | 2025.01.09 |
|---|---|
| 제5회 인공지능인문학 대학생 학술논문 경연대회 장려상 (4) | 2024.11.17 |